 丁香医生审稿专业委员会同行评议通过
丁香医生审稿专业委员会同行评议通过扫地机器人买来就后悔,是广告忽悠还是你没挑对?
要说什么家务最累人,地面清洁一定常居前几名。
衣服大多是机洗,碗筷清洁不会太耗时。地面清洁不仅面积最大,还最耗费体力。
茶几、沙发底下堆积的灰尘,厨房里难清洁的油渍,无时无刻都在掉落的毛发……想把这些都彻底清理干净,花费个把小时都算快的。

图片来源:丁香生活研究所设计团队
于是,很多人把扫地机器人当成了救星,希望它把自己从繁琐的家务中解救出来!但也免不了有所顾虑,大部分集中在两个方面:

图片来源:丁香生活研究所设计团队
基于这两点担忧,今天给大家细细拆解一下,选购扫地机器人时具体要看哪些指标。
干不干净看吸力和清洁配件
扫地机器人的清洁能力,基本上取决于扫地机器人的吸力和清洁工具。
- 吸力不是越大越好
通常来讲,吸力越大吸尘的能力就越强。但吸力越大的机器,噪音问题一般就越明显,以及消耗的电力也越快,一次性清扫面积就比较有限。
扫地机器人日常大面积重复清扫的工具,主要目标是浮尘、毛发等轻污染物,一般 1000pa ~2000pa 的吸力就能满足日常清扫需求,也有一些大吸力智能型的机器,可以判断地面情况自动调整吸力。
- 清洁工具首选组合式
大多数品牌的旗舰型号,都在使用「双边刷+中间滚刷」设计。
双边刷,可以尽可能大面积地覆盖扫地面积,相当于过一次扫两次;中间的滚刷类似吸尘器电动吸头,能将地板缝隙中的尘土搅动出来,清洁更彻底。
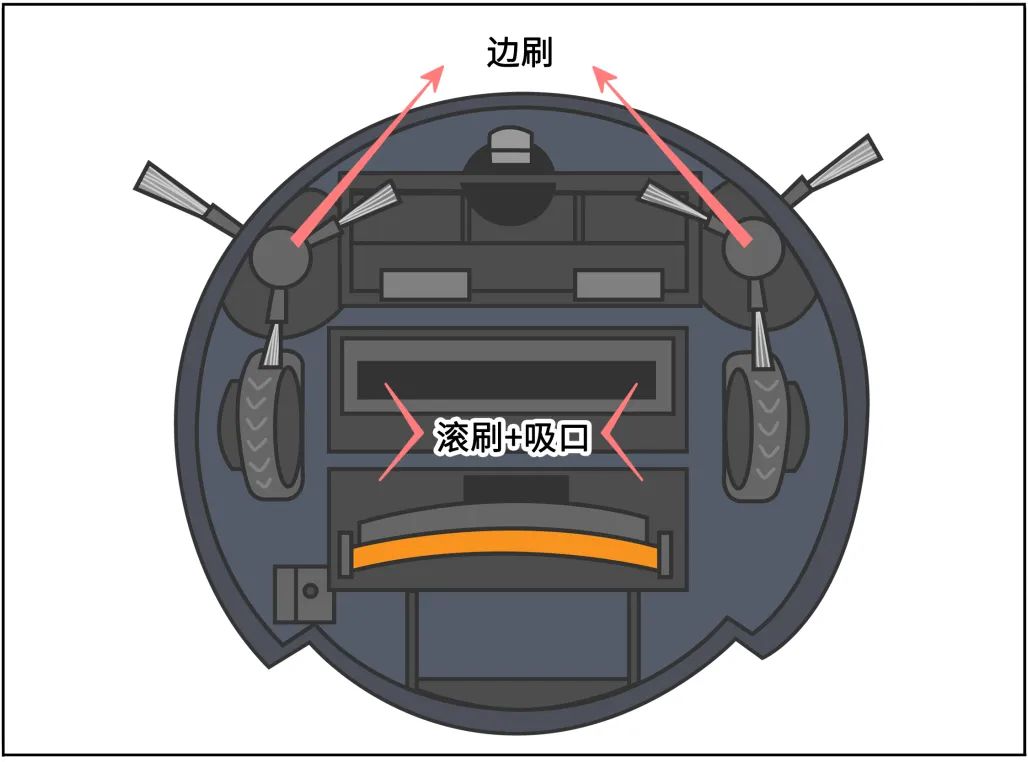
图片来源:丁香生活研究所设计团队
把这两者都配齐的扫地机器人,用起来会更轻松高效。
省不省心扫地机器人的智能水平
扫地机器人聪不聪明,主要就是看路径规划与避障能力,它们决定了机器人能否一次性高效地清洁到家里的每个角落。
这两方面性能,取决于机器人的避障系统和导航系统。
- 避障系统决定机器灵活度
扫地机器人使用的各类传感器决定了避障能力,比如防碰撞传感器,大致有这么几类:微动开关是碰撞后触发回避;红外和超声可以探测前方物体,但精确度不高;摄像头视觉光和结构光探测技术,相对比较精准。
以及机器越障能力,一般由驱动系统和传感器组合决定。无论是跨过各屋门下的密封条,还是爬上一些不厚的地毯进行清扫都需要用到。
可越障的高度通常越大越好,简单来说:1cm 合格,2cm 优秀,2cm 以上就很出色了。
图片来源:丁香生活研究所设计团队
- 重中之重,导航系统
对扫地机器人智能水平起决定性作用的,则是导航系统。导航系统通常和导航传感器协同工作,给室内区域建图或者建模,再通过算法规划出清扫路线。
从实际表现来看,技术从低到高可分成以下三大类导航系统:
1.惯性导航
简单说就是没有导航,全靠随机碰撞。清扫时间长、回充靠缘分,是扫地机器人刚研发出来时所用的导航方式,目前高端产品基本不采用这种导航系统。
需要注意的是,部分低端扫地机器人会介绍自己采用的是「红外线导航」、「超声波导航」、「陀螺仪导航」等导航方式,实则和随机碰撞几乎没有差别,不要被误导。
2.视觉导航
视觉导航以摄像头为主要工具,通过位置的不断移动,时时捕捉空间内的有效特征点。比对、匹配位置坐标,测算出相对环境内的坐标,进行定位和地图构建。
这类导航相比碰撞式更为先进可靠,但同时也对算法优化、芯片处理能力提出挑战,不同品牌间的技术差异比较大。
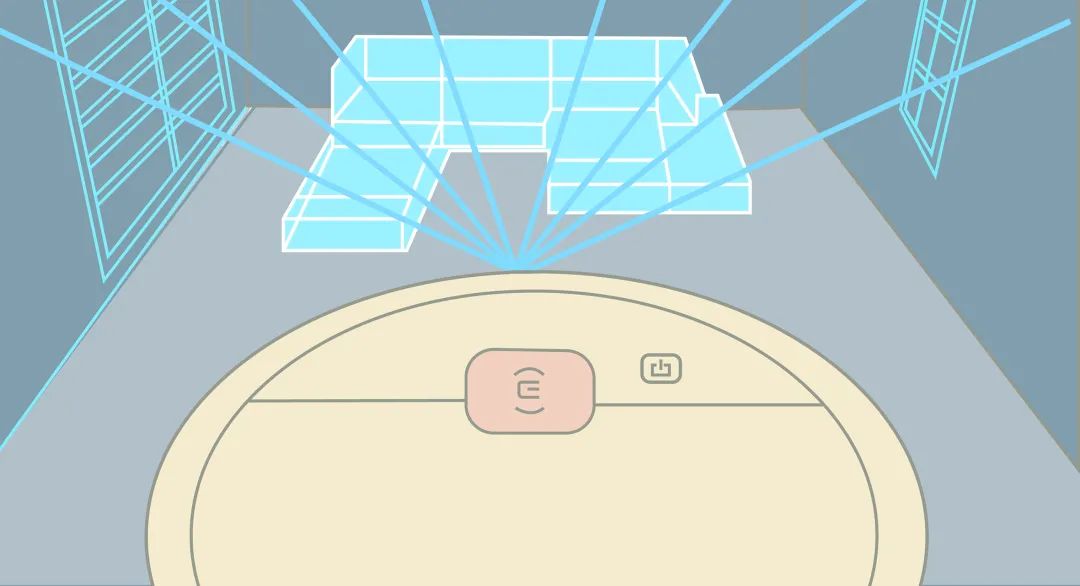
3.激光导航
激光导航分为 LDS 激光导航和 dTof 激光导航,它们通过发射激光来探测周围环境,在移动运行过程中完成对整个空间的模型建立。
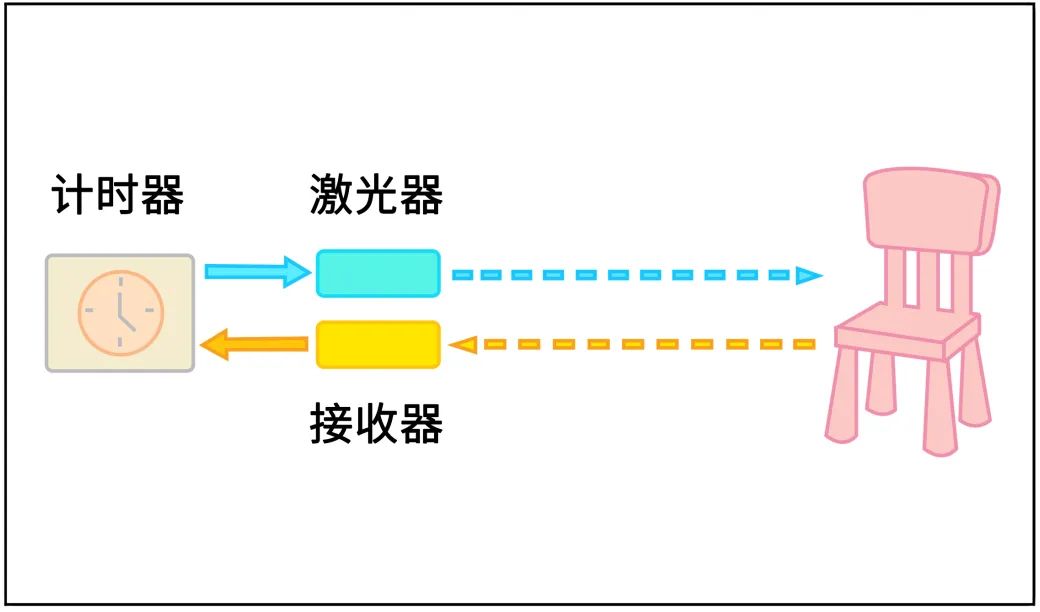
LDS 是目前市场大部分扫地机器人采用的导航技术,所谓 LDS(Laser Direct Structuring)就是激光雷达,通过一个凸起的扫描器高速旋转发射激光,以触及障碍物反射回来的时间判断物体距离,从而确定位置实现定位。
图片来源:丁香生活研究所设计团队
LDS 激光导航建模较视觉导航更精确、路径规划更合理。因为技术成熟,所以通常性价比较高,是适合大多数家庭的选择。
但该种方式也仍有提升空间,因为 LDS 激光头更偏向于生成类似 2D 的平面图,对于室内地上的小物件如玩具、电源线等杂物避障识别度不足。
这儿就要提到 dTof 激光导航了,dTof (direct time-of-flight,即直接飞行时间)是 LDS 的进阶版。它通过直接发射光脉冲来监测物体,相较激光雷达能更精确判断周围物体的位置,高频重复这一过程,就能绘制出物体的 3D 形态。

图片来源:丁香生活研究所设计团队
应用在扫地机器人上,dTof 可以更精准的规划路线与避障,可以说是高端产品才会匹配的系统。
进一步提升使用体验 可以看是否有这些加分项
- APP 功能齐不齐全。能不能远程操控或是预约清扫?只想清洁某一区域怎么办?什么时候要更换耗材?这些问题都需要 APP 来回答,功能越强大,机器自然越好用。
- 扫吸拖一体。即在扫地吸尘的基础上再加入拖地功能,带来更好的地面清洁效果。
- 自动集尘功能。这也是升级项体验,可以自动收集扫地机器人清扫后的垃圾,减少人工倾倒次数。
本文经由 家电研发工程师 口木 审核
作者:无优
策划:一只蚊
监制:忘洗头
图片来源:丁香生活研究所设计团队
原创文章:丁香园版权所有,未经许可不得转载。
本文已通过丁香医生审稿专家委员会的同行评议。
相关文章



